Munic.Box 3 release description
Munic.Box is designed to work on most vehicles (cars, light trucks, SUVs, and minivans) & heavy trucks eOBD and OBD-II compliant:
In the current release, Munic.Box is compatible with electric vehicles & GLP vehicles.
| Territory | Dataplan | Duration | Coverage |
|---|---|---|---|
| North America | 2 Mbytes per month | 2 years | USA (for Canada & Mexico contact us) |
| Europe | 2 Mbytes per month | 2 years | EU countries |
| Feature | Characteristic | included |
|---|---|---|
| Processor | Cortex A5 |  |
| Connectivity | GSM/ GPRS - quad bands | |
| GPS receiver | Ublox M8030-KT (M8) (assisted GPS enabled) Sensitivity : -167 dBm, 72 channels |
|
| RAM memory | 128 Mbytes | |
| Flash memory | 256 Mbytes | |
| 3D Accelerometer | Full scale output range:±2g/±4g/±6g/±8g/±16g 16-bit data output - low temperature drift – good linearity |
|
| 3D Gyro | ±250°/s, ±500°/s, ±1000°/s, ±2000°/s | - (*) |
| PIN Switching | Solid-state relays for PIN switching | - (*) |
| CAN | CAN | |
| Simultaneous dual CAN | - (*) | |
| OBD | SAE J1850 PWM, SAE J1850 VPW, ISO 9141, ISO 14230 KWP2000, ISO 15765-4 11 bits, ISO 15765-4 29 bits CAN | |
| Advanced vehicle protocol supports | J2819, ISO14229, J2411, ISO15765 ,J1939 ... | With extended modules |
| Mini USB (2.0 Host/Device) (not powered on internal battery) | Powered (limited to 100 mA on 5V) when connected to external power | |
| Internal battery | 450 mAh | |
| Internal buzzer | - (*) | |
| Operating Temperature | -30/+65°C without battery | |
| Dimensions (mm) | 27 x 48 x 49.5 without connector / 60.5 x 26.5 x 49.5 with connector | |
| Voltage | 8V-18V systems supported | |
(*) Available on other versions
| Feature | Characteristic | included |
|---|---|---|
| Processor | CortexA5 | |
| Connectivity | 3G US | |
| GPS receiver | Ublox M8030-KT (M8) (assisted GPS enabled) Sensitivity : -167 dBm, 72 channels |
|
| RAM memory | 128 Mbytes | |
| Flash memory | 256 Mbytes | |
| 3D Accelerometer | Full scale output range:±2g/±4g/±6g/±8g/±16g 16-bit data output - low temperature drift – good linearity |
|
| 3D Gyro | ±250°/s, ±500°/s, ±1000°/s, ±2000°/s | - (*) |
| PIN Switching | Solid-state relays for PIN switching | - (*) |
| CAN | CAN | |
| Simultaneous dual CAN | - (*) | |
| OBD | SAE J1850 PWM, SAE J1850 VPW, ISO 9141, ISO 14230 KWP2000, ISO 15765-4 11 bits, ISO 15765-4 29 bits CAN | |
| Advanced vehicle protocol supports | J2819, ISO14229, J2411, ISO15765 ,J1939 ... | With extended modules |
| Mini USB (2.0 Host/Device) (not powered on internal battery) | Powered (limited to 100 mA on 5V) when connected to external power | |
| Internal battery | 450 mAh | |
| Internal buzzer | - (*) | |
| Operating Temperature | -30/+65°C without battery | |
| Dimensions (mm) | 27 x 48 x 49.5 without connector / 60.5 x 26.5 x 49.5 with connector | |
| Voltage | 8V-18V systems supported | |
(*) Available on other versions
| Feature | Characteristic | included |
|---|---|---|
| Processor | Cortex A5 | |
| Connectivity | 4G catM NA or EUR with 2G fallback | |
| GPS receiver | Ublox M8030-KT (M8) (assisted GPS enabled) Sensitivity : -167 dBm, 72 channels |
|
| RAM memory | 128 Mbytes | |
| Flash memory | 256 Mbytes | |
| 3D Accelerometer | Full scale output range:±2g/±4g/±6g/±8g/±16g 16-bit data output - low temperature drift – good linearity |
|
| 3D Gyro | ±250°/s, ±500°/s, ±1000°/s, ±2000°/s | - (*) |
| PIN Switching | Solid-state relays for PIN switching | - (*) |
| CAN | CAN | |
| Simultaneous dual CAN | - (*) | |
| OBD | SAE J1850 PWM, SAE J1850 VPW, ISO 9141, ISO 14230 KWP2000, ISO 15765-4 11 bits, ISO 15765-4 29 bits CAN | |
| Advanced vehicle protocol supports | J2819, ISO14229, J2411, ISO15765 ,J1939 ... | With extended modules |
| Mini USB (2.0 Host/Device) (not powered on internal battery) | Powered (limited to 100 mA on 5V) when connected to external power | |
| Internal battery | 450 mAh | |
| Internal buzzer | - (*) | |
| Operating Temperature | -30/+65°C without battery | |
| Dimensions (mm) | 27 x 48 x 49.5 without connector / 60.5 x 26.5 x 49.5 with connector | |
| Voltage | 8V-18V systems supported | |
(*) Available on other versions
| Feature | Characteristic | included |
|---|---|---|
| Processor | Cortex A5 | |
| Connectivity | 4G EU or US (with fallback in 3G) | |
| GPS receiver | Ublox M8030-KT (M8) (assisted GPS enabled) Sensitivity : -167 dBm, 72 channels |
|
| RAM memory | 128 Mbytes | |
| Flash memory | 256 Mbytes | |
| 3D Accelerometer | Full scale output range:±2g/±4g/±6g/±8g/±16g 16-bit data output - low temperature drift – good linearity |
|
| 3D Gyro | ±250°/s, ±500°/s, ±1000°/s, ±2000°/s | - (*) |
| PIN Switching | Solid-state relays for PIN switching | - (*) |
| CAN | CAN | |
| Simultaneous dual CAN | - (*) | |
| OBD | SAE J1850 PWM, SAE J1850 VPW, ISO 9141, ISO 14230 KWP2000, ISO 15765-4 11 bits, ISO 15765-4 29 bits CAN | |
| Advanced vehicle protocol supports | J2819, ISO14229, J2411, ISO15765 ,J1939 ... | With extended modules |
| Mini USB (2.0 Host/Device) (not powered on internal battery) | Powered (limited to 100 mA on 5V) when connected to external power | |
| Internal battery | 270 mAh | |
| Internal buzzer | - (*) | |
| Operating Temperature | -30/+65°C without battery | |
| Dimensions (mm) | 27 x 48 x 49.5 without connector / 60.5 x 26.5 x 49.5 with connector | |
| Voltage | 8V-18V systems supported | |
(*) Available on other versions
| Feature | Characteristic | included |
|---|---|---|
| Processor | Cortex A7 | |
| Connectivity | 4G catM NA or EUR with 2G fallback | |
| GPS receiver | Ublox M8030-KT (M8) or UBX-M10050-KB (assisted GPS enabled) Sensitivity : -167 dBm, 72 channels |
|
| RAM memory | 256 Mbytes | |
| Flash memory | 256 Mbytes | |
| 3D Accelerometer | Full scale output range:±2g/±4g/±6g/±8g/±16g 16-bit data output - low temperature drift – good linearity |
|
| 3D Gyro | ±125/±250/±500/±1000/±2000 °/sec | - (*) |
| PIN Switching | Solid-state relays for PIN switching | - (*) |
| CAN | CAN | |
| Simultaneous dual CAN | - (*) | |
| OBD | CAN ISO 15765/15765-2, ISO 9141-2/ISO 14230 (KWP2000), SAE J1850 VPW - SAE J1850 PWM | |
| Advanced vehicle protocol supports | J2819, ISO14229, J2411, ISO15765 ,J1939 ... | With extended modules |
| Mini USB (2.0 Host/Device) (not powered on internal battery) | Powered (limited to 100 mA on 5V) when connected to external power | |
| Internal battery | 450 mAh | |
| Internal buzzer | - (*) | |
| Operating Temperature | -30/+65°C without battery | |
| Dimensions (mm) | 27 x 48 x 50 without connector / 61 x 27 x 50 with connector | |
| Voltage | 8V-18V systems supported | |
(*) Available on other versions
| Feature | Characteristic | included |
|---|---|---|
| Processor | Cortex A7 | |
| Connectivity | 4G cat4 EUR or NA | |
| GPS receiver | Ublox M8030-KT (M8) or UBX-M10050-KB (assisted GPS enabled) Sensitivity : -167 dBm, 72 channels |
|
| RAM memory | 256 Mbytes | |
| Flash memory | 512 Mbytes | |
| 3D Accelerometer | Full scale output range:±2g/±4g/±6g/±8g/±16g 16-bit data output - low temperature drift – good linearity |
|
| 3D Gyro | ±125/±250/±500/±1000/±2000 °/sec | - (*) |
| PIN Switching | Solid-state relays for PIN switching | - (*) |
| CAN | CAN | |
| Simultaneous dual CAN | - (*) | |
| OBD | CAN ISO 15765/15765-2, ISO 9141-2/ISO 14230 (KWP2000), SAE J1850 VPW - SAE J1850 PWM | |
| Advanced vehicle protocol supports | J2819, ISO14229, J2411, ISO15765 ,J1939 ... | With extended modules |
| Mini USB (2.0 Host/Device) (not powered on internal battery) | Powered (limited to 100 mA on 5V) when connected to external power | |
| Internal battery | 270 mAh | |
| Internal buzzer | - (*) | |
| Operating Temperature | -30/+65°C without battery | |
| Dimensions (mm) | (56 x 27 x 51 without connector / 71 x 27 x 51 with connector | |
| Voltage | 8V-18V systems supported | |
(*) Available on other versions
| Event Name | Record_Reason | States | included |
|---|---|---|---|
| Ignition On/Off | 0 | 0: Ignition OFF / 1: Ignition ON | |
| Idle in | 1 | 201: No movement | |
| Over speed | 2 | 0: no Overspeed detected / 1: Overspeed detected | |
| Over RPM | 3 | 0: no Over RPM detected / 1: OverRPM detected | |
| Idle out | 4 | 4: external power supply / 8: Accelerometer movement detected / 128: Periodical Wake Up | |
| Journey On/Off | 5 | 0: OFF / 1: ON | |
| Idling | 6 | 0: OFF / 1: ON | |
| Tow away | 7 | 0: OFF / 1: ON | |
| External battery low | 12 | 0: Normal battery level / 1: Low external battery | |
| DTC Malfunction Indicator Light (MIL) | 13 | 0: MIL OFF / 1: MIL ON | |
| DTC number | 14 | integer: number of listed DTC | |
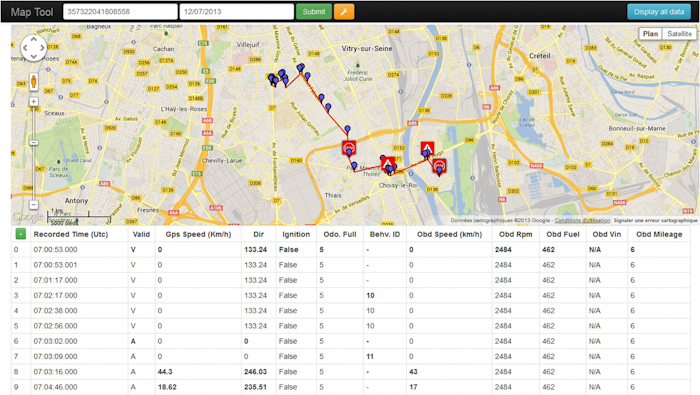
| Name | Field | Field Type | Size | Description | MunicOS v2 | MunicOS v3 |
|---|---|---|---|---|---|---|
| GPRMC_VALID | 3 | string | 1 | Last validity state of the latest GPS GPRMC frame. 'A' is valid and 'V' is invalid. | |
|
| GPS_SPEED | 8 | integer | 3 | Stores the last valid speed of the GPS in 1/1000th knots. | |
|
| GPS_DIR | 9 | integer | 3 | Stores the last valid course of the GPS in 1/100th degrees. | |
|
| DIO_IGNITION | 14 | boolean | 1 | Stores the state of the ignition input. | |
|
| BATT | 15 | integer | 1 | External battery presence status (1 if present, 0 if not) - Munic Box 2 required | |
|
| ODO_PARTIAL_KM | 23 | string | 4 | Stores value in kilometers of the GPS's partial odometer. | |
|
| ODO_FULL | 24 | integer | 4 | Stores value in kilometers of the GPS's full odometer. | |
|
| GPS_PDOP | 40 | integer | 1 | Positional dilution of the precision of the GPS. | |
|
| AREA_LIST | 53 | string | 32 | Stores the list of crossed areas. Format is (FileId:AreaId;)*. | |
|
| GPS_FIXED_SAT_NUM | 55 | integer | 1 | Number of satellites used for the GPS fix. | |
|
| BEHAVE_ID | 100 | integer | 4 | Pattern ID | |
|
| BEHAVE_LONG | 101 | integer | 8 | Longitude of the event. Hundred thousandths of degrees. Positive means East | |
|
| BEHAVE_LAT | 102 | integer | 8 | Latitude of the event. Hundred thousandths of degrees. Positive means North | |
|
| BEHAVE_DAY_OF_YEAR | 103 | integer | 8 | Day of the event. 25/10/2012 will be 121025 | |
|
| BEHAVE_TIME_OF_DAY | 104 | integer | 8 | Time of the event. 14:35:12 will be 143512 | |
|
| BEHAVE_GPS_SPEED_BEGIN | 105 | integer | 8 | GPS speed at the beginning of the event in 1/1000th knots | |
|
| BEHAVE_GPS_SPEED_PEAK | 106 | integer | 8 | GPS speed at the peak of the event in 1/1000th knots | |
|
| BEHAVE_GPS_SPEED_END | 107 | integer | 8 | GPS speed at the end of the event in 1/1000th knots | |
|
| BEHAVE_GPS_HEADING_BEGIN | 108 | integer | 8 | GPS heading at the beginning of the event in 1/1000th degrees | |
|
| BEHAVE_GPS_HEADING_PEAK | 109 | integer | 8 | GPS heading at the peak of the event in 1/1000th degrees | |
|
| BEHAVE_GPS_HEADING_END | 110 | integer | 8 | GPS heading at the end of the event in 1/1000th degrees | |
|
| BEHAVE_ACC_X_BEGIN | 111 | integer | 8 | Acceleration on X at the beginning of the event in mG | |
|
| BEHAVE_ACC_X_PEAK | 112 | integer | 8 | Acceleration on X at the peak of the event in mG | |
|
| BEHAVE_ACC_X_END | 113 | integer | 8 | Acceleration on X at the end of the event in mG | |
|
| BEHAVE_ACC_Y_BEGIN | 114 | integer | 8 | Acceleration on Y at the beginning of the event in mG | |
|
| BEHAVE_ACC_Y_PEAK | 115 | integer | 8 | Acceleration on Y at the peak of the event in mG | |
|
| BEHAVE_ACC_Y_END | 116 | integer | 8 | Acceleration on Y at the end of the event in mG | |
|
| BEHAVE_ACC_Z_BEGIN | 117 | integer | 8 | Acceleration on Z at the beginning of the event in mG | |
|
| BEHAVE_ACC_Z_PEAK | 118 | integer | 8 | Acceleration on Z at the peak of the event in mG | |
|
| BEHAVE_ACC_Z_END | 119 | integer | 8 | Acceleration on Z at the end of the event in mG | |
|
| BEHAVE_ELAPSED | 120 | integer | 8 | Pattern duration in ms | |
|
| BEHAVE_UNIQUE_ID | 121 | integer | 4 | Unique event id per session (reset at reboot) | |
|
| MDI_CRASH_DETECTED | 122 | string | 8 | When a crash on the device is detected, this field is set to |
|
|
| EVENT | 127 | string | 128 | Boot and shutdown reasons. B:4 Booted by external power supply / B:8 Booted by accelerometer / B:128 Booted by periodical wake up. S:3-201 Shutdown on no movement | |
|
| MDI_EXT_BATT_LOW | 150 | boolean | 1 | Low external battery voltage status. | |
|
| MDI_EXT_BATT_VOLTAGE | 151 | integer | 4 | Current external battery voltage in mV | |
|
| MDI_PANIC_STATE | 152 | boolean | 1 | True when Panic button is pressed, false otherwise | |
|
| MDI_PANIC_MESSAGE | 153 | string | 50 | Longitude:Latitude:Time:GPSfix:NumberOfSatellites:PartialOdo:FullOdo:RSSI:IMEI:TraveledTime | |
|
| MDI_DTC_MIL | 154 | boolean | 1 | Malfunction Indicator Lamp (MIL) state | |
|
| MDI_DTC_NUMBER | 155 | integer | 4 | Number of DTC. | |
|
| MDI_DTC_LIST | 156 | string | 255 | List of DTC(s). Fomat: 'ECU_ID:DTC_X,DTC_Y,ECU_ID:DTC_X,DTC_Y' | |
|
| MDI_RPM_MAX | 157 | integer | 5 | The RPM max value during a journey | |
|
| MDI_RPM_MIN | 158 | integer | 5 | The RPM minimum found along a journey | |
|
| MDI_RPM_AVERAGE | 159 | integer | 5 | The RPM average along a journey | |
|
| MDI_RPM_OVER | 160 | boolean | 4 | True if RPM value has got over a treshold value false otherwise | |
|
| MDI_RPM_AVERAGE_RANGE_1 | 161 | integer | 4 | RPM average for first range. | |
|
| MDI_RPM_AVERAGE_RANGE_2 | 162 | integer | 4 | RPM average for second range. | |
|
| MDI_RPM_AVERAGE_RANGE_3 | 163 | integer | 4 | RPM average for third range. | |
|
| MDI_RPM_AVERAGE_RANGE_4 | 164 | integer | 4 | RPM average for fourth range. | |
|
| MDI_SENSORS_RECORDER_DATA | 165 | string | 32 | Data returned by the sensor recorder. | |
|
| MDI_SENSORS_RECORDER_CALIBRATION | 166 | string | 32 | Sensor recorder calibration. | |
|
| ODO_PARTIAL_METER | 167 | integer | 4 | Stores value in meters of the GPS partial odometer | |
|
| ODO_FULL_METER | 168 | integer | 4 | Stores value in meters of the GPS full odometer | |
|
| MDI_OBD_PID_1 | 215 | string | 255 | Result of the 1st OBD request encoded in base 64 | |
|
| MDI_OBD_PID_2 | 216 | string | 255 | Result of the 2nd OBD request encoded in base 64 | |
|
| MDI_OBD_PID_3 | 217 | string | 255 | Result of the 3rd OBD request encoded in base 64 | |
|
| MDI_OBD_PID_4 | 218 | string | 255 | Result of the 4th OBD request encoded in base 64 | |
|
| MDI_OBD_PID_5 | 219 | string | 255 | Result of the 5th OBD request encoded in base 64 | |
|
| MDI_DASHBOARD_MILEAGE | 223 | integer | 4 | Mileage value in kilometers from the dashboard. See modules and apps | |
|
| MDI_DASHBOARD_FUEL | 224 | integer | 4 | Fuel level in liters from the dashboard. See modules and apps | |
|
| MDI_DASHBOARD_FUEL_LEVEL | 225 | integer | 4 | Fuel level in percent from the dashboard. See modules and apps | |
|
| MDI_DIAG_1 | 226 | string | 128 | None set | |
|
| MDI_DIAG_2 | 227 | string | 128 | None set | |
|
| MDI_DIAG_3 | 228 | string | 128 | None set | |
|
| MDI_PENDING_DTC_LIST | 230 | string | 128 | List of pending DTCs. Same format as MDI_DTC_LIST | |
|
| MDI_MAX_RPM_IN_LAST_OVER_RPM | 231 | integer | 4 | Max RPM in last over-RPM session. | |
|
| MDI_OBD_MILEAGE_METERS | 232 | integer | 4 | Mileage in meters obtained from the OBD stack. | |
|
| MDI_IDLE_STATE | 233 | boolean | 1 | True if car is idling, false otherwise. | |
|
| MDI_VEHICLE_STATE | 234 | string | 3 | Vehicle state : Journey On (0), Journey Off (1), Idling(2), Tow Away (3) Pattern: "from:to" | |
|
| MDI_OBD_SPEED | 235 | integer | 4 | Speed value in km/h obtained from the OBD | |
|
| MDI_OBD_RPM | 236 | integer | 4 | Engine RPM obtained from the OBD | |
|
| MDI_OBD_FUEL | 237 | integer | 4 | Total cumulated quantity (in mL) of fuel consumed since last reset . Estimated with OBD2 or eOBD instantaneous data (not the dashboard data that is available with additional module) | |
|
| MDI_OBD_VIN | 238 | string | 17 | VIN obtained from the OBD | |
|
| MDI_OBD_MILEAGE | 239 | integer | 4 | Mileage in kilometers obtained from the OBD | |
|
| MDI_JOURNEY_TIME | 240 | integer | 4 | Latest journey time in seconds = Driving time + Idling time | |
|
| MDI_IDLE_JOURNEY | 241 | integer | 4 | Idling time of the latest journey in seconds | |
|
| MDI_DRIVING_JOURNEY | 242 | integer | 4 | Driving time of the latest journey in seconds | |
|
| MDI_MAX_SPEED_IN_LAST_OVERSPEED | 243 | integer | 4 | Max speed in last overspeed session. | |
|
| MDI_OVERSPEED_COUNTER | 244 | integer | 4 | Number of overspeed during the latest journey | |
|
| MDI_TOW_AWAY | 245 | boolean | 1 | Tow away state | |
|
| MDI_ODO_JOURNEY | 246 | integer | 4 | Total distance driving in the latest journey | |
|
| MDI_OVERSPEED | 247 | boolean | 1 | Overspeed state | |
|
| MDI_MAX_SPEED_JOURNEY | 248 | integer | 4 | Maximum speed of the latest journey | |
|
| MDI_JOURNEY_STATE | 249 | boolean | 1 | Journey status | |
|
| MDI_RECORD_REASON (deprecated) | 250 | string | 10 | Record reason (This field should not be used anymore) | |
|
| ENH_DASHBOARD_MILEAGE | 10223 | string | 32 | Mileage value in kilometers from the dashboard. See modules and apps | |
|
| ENH_DASHBOARD_FUEL | 10224 | string | 32 | Fuel level in liters from the dashboard. See modules and apps | |
|
| ENH_DASHBOARD_FUEL_LEVEL | 10225 | string | 32 | Fuel level in percent from the dashboard. See modules and apps | |
For driver behaviour, please check here: http://www.munic.io/documentations/how_it_works#toc_4
| Event Name | Fields | Optional fields (configurable with the Device Manager) |
|---|---|---|
| Periodical | MDI_GPRMC_VALID; MDI_GPS_DIR | MDI_GPS_SPEED or MDI_OBD_SPEED |
| Ignition event | MDI_GPRMC_VALID; MDI_PDOP; MDI_DIO_IGNITION; MDI_GPS_SPEED; MDI_GPS_DIR; MDI_RECORD_REASON | |
| Idle in event | MDI_GPRMC_VALID; MDI_PDOP; MDI_GPS_SPEED; MDI_GPS_DIR; MDI_ODO_FULL; MDI_OBD_MILEAGE; MDI_RECORD_REASON | |
| Over speed event | MDI_GPRMC_VALID; MDI_PDOP; MDI_GPS_SPEED; MDI_GPS_DIR; MDI_OBD_MILEAGE; MDI_OBD_SPEED; MDI_OBD_RPM; MDI_OVERSPEED_COUNTER; MDI_RECORD_REASON | |
| Over RPM event | MDI_GPRMC_VALID; MDI_PDOP; MDI_GPS_SPEED; MDI_GPS_DIR; MDI_OBD_MILEAGE; MDI_OBD_SPEED; MDI_OBD_RPM; MDI_MAX_RPM; MDI_MIN_RPM; MDI_AVERAGE_RPM; MDI_RECORD_REASON | |
| Idle out event | MDI_GPRMC_VALID; MDI_PDOP; MDI_GPS_SPEED; MDI_GPS_DIR; MDI_ODO_FULL; MDI_OBD_MILEAGE; MDI_DTC_MIL; MDI_DTC_NUMBER; MDI_DTC_LIST; MDI_RECORD_REASON | |
| Journey event | MDI_GPRMC_VALID; MDI_PDOP; MDI_DIO_IGNITION; MDI_GPS_SPEED; MDI_GPS_DIR; MDI_RECORD_REASON | MDI_ODO_FULL; MDI_OBD_FUEL; MDI_OBD_VIN; MDI_OBD_MILEAGE; MDI_OVERSPEED_COUNTER; MDI_OVERSPEED; MDI_MAX_SPEED_JOURNEY; MDI_DRIVING_JOURNEY; MDI_IDLING_JOURNEY; MDI_JOURNEY_TIME; MDI_ODO_JOURNEY; MDI_EXT_BATT_LOW; MDI_EXT_BATT_VOLTAGE; MDI_RPM_OVER; MDI_DTC_MIL; MDI_DTC_NUMBER; MDI_DTC_LIST |
| Idling event | MDI_GPRMC_VALID; MDI_PDOP; MDI_GPS_SPEED; MDI_GPS_DIR; MDI_VEHICLE_STATE; MDI_RECORD_REASON | |
| Tow away event | MDI_GPRMC_VALID; MDI_PDOP; MDI_GPS_SPEED; MDI_GPS_DIR; MDI_VEHICLE_STATE; MDI_RECORD_REASON | |
| External battery low event | MDI_GPRMC_VALID; MDI_PDOP; MDI_GPS_SPEED; MDI_GPS_DIR; MDI_EXT_BATT_LOW; MDI_EXT_BATT_VOLTAGE; MDI_RECORD_REASON | |
| DTC MIL event | MDI_GPRMC_VALID; MDI_PDOP; MDI_GPS_SPEED; MDI_GPS_DIR; MDI_DTC_MIL; MDI_DTC_NUMBER; MDI_DTC_LIST; MDI_RECORD_REASON | |
| DTC event | MDI_GPRMC_VALID; MDI_PDOP; MDI_GPS_SPEED; MDI_GPS_DIR; MDI_DTC_MIL; MDI_DTC_NUMBER; MDI_DTC_LIST; MDI_RECORD_REASON |
| Feature | Description | Access |
|---|---|---|
| Webhook | Real time forwarding of data from Munic.Box to an external configurable URL via POST requests | |
| Rest API | REST webservice API provides a simple interface for most CloudConnect features such as data collection and the application store | |
| Premium SDK | Software development kit that enables you to develop your own embedded application thanks to a 3000 rich API framework |
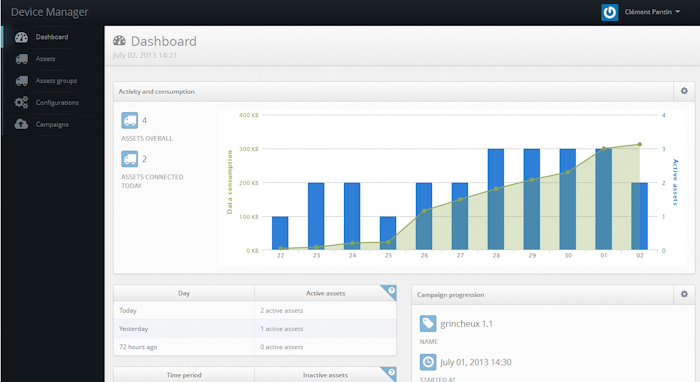
Demo portal that includes: